Grid SPH¶
The Grid-SPH method is a hybrid approach between traditional SPH and grid-based density estimation. Instead of performing k-nearest neighbor searches, it computes particle statistics on a grid and uses integral images to efficiently approximate SPH-like smoothing. This approach is significantly faster for large datasets while maintaining reasonable accuracy.
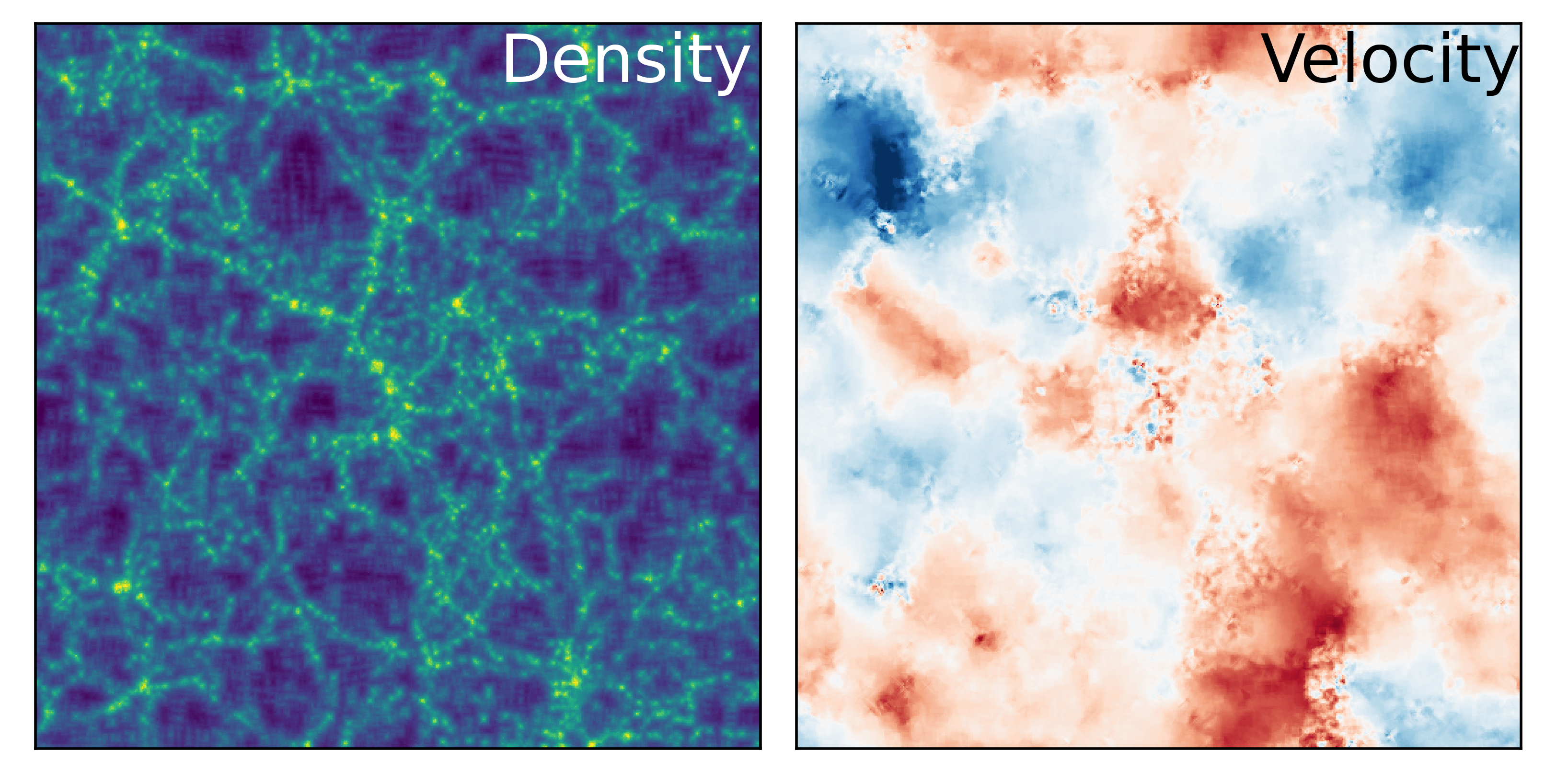
The density and velocity field of a cosmological simulation computed with GridSPH.
gridSPH2D¶
2D grid-based SPH density or field estimation.
Overview¶
This method computes density or field estimates by:
Assigning particles to a grid using nearest-grid-point (NGP) assignment
Building an integral image for fast region summation
Estimating SPH-like volumes using enclosed particle counts
Converting volume estimates into density or field values
Example¶
import fiesta
boxsize = 100
ngrid = 256
rho = fiesta.gridsph.gridSPH2D(x, y, boxsize, ngrid, minpart=5)
temp = fiesta.gridsph.gridSPH2D(x, y, [100, 100], 128, f=temperature, minpart=10)
gridSPH3D¶
3D extension of the Grid-SPH method.
Overview¶
This function extends the 2D grid-SPH algorithm into three dimensions, using 3D integral images for fast volume estimation.
Example¶
import fiesta
boxsize = 100
ngrid = 256
rho = fiesta.gridsph.gridSPH3D(x, y, z, boxsize, ngrid, minpart=10)
temp = fiesta.gridsph.gridSPH3D(x, y, z, [200, 200, 200], 64, f=temperature, minpart=20)
API Reference¶
- fiesta.gridsph.gridSPH2D(x: ndarray, y: ndarray, boxsize: float | List[float], ngrid: int, minpart: int = 1, w: ndarray | None = None, f: ndarray | None = None, periodic: bool | List[bool] = True, dgrid: ndarray | None = None, fgrid: ndarray | None = None) Tuple[ndarray, ndarray]
The grid SPH method. This method is similar to a k-Nearest Neighbour method although performed on a grid for speed.
- Parameters:
x (array) – X and Y coordinates of the points.
y (array) – X and Y coordinates of the points.
minpart (int, optional) – Minimum number of particles.
w (array, optional) – Weights for the points, if None assumed to be unitary for all.
f (array, optional) – Field values for the points, if None it is assumed the intention is to compute density.
periodic (bool or list, optional) – Periodic boundary condition.
dgrid (array, optional) – Precomputed density grid, computed using p2g.part2grid2D.
fgrid (array, optional) – Precomputed field grid, computed using p2g.part2grid2D, and unnormalised by density.
- Returns:
dgridSPH (array) – Grid SPH density estimation.
fgridSPH (array) – If f is not None then the field is estimated via SPH.
- fiesta.gridsph.gridSPH3D(x: ndarray, y: ndarray, z: ndarray, boxsize: float | List[float], ngrid: int, minpart: int = 1, w: ndarray | None = None, f: ndarray | None = None, periodic: bool | List[bool] = True, dgrid: ndarray | None = None, fgrid: ndarray | None = None) Tuple[ndarray, ndarray]
The grid SPH method. This method is similar to a k-Nearest Neighbour method although performed on a grid for speed.
- Parameters:
x (array) – X, Y, and Z coordinates of the points.
y (array) – X, Y, and Z coordinates of the points.
z (array) – X, Y, and Z coordinates of the points.
boxsize (float) – Size of the 3D grid.
ngrid (int) – Grid size.
minpart (int, optional) – Minimum number of particles.
w (array, optional) – Weights for the points, if None assumed to be unitary for all.
f (array, optional) – Field values for the points, if None it is assumed the intention is to compute density.
periodic (bool, optional) – Periodic boundary condition.
dgrid (array, optional) – Precomputed density grid, computed using p2g.part2grid3D.
fgrid (array, optional) – Precomputed field grid, computed using p2g.part2grid3D, and unnormalised by density.
- Returns:
dgridSPH (array) – Grid SPH density estimation.
fgridSPH (array) – If f is not None then the field is estimated via SPH.